The purpose of the lab is to provide me with the basic knowledge of performing preprocessing and processing operations of remotely sensed radar imagery. Radar interpretation is considerably different than conventional remote sensing. Radar is more closely related to Lidar due to the active sensor which emits a beam and receives a return signal. All radar imagery is collected off nadir so image correction is a must. The topics covered in the lab include:
- noise reduction through speckle filtering
- spectral and spatial enhancement
- multi-sensor fusion
- texture analysis
- polarimetric processing
- slant-range to ground-range conversion
Methods
The first half of the methods was performed in Erdas Imagine. The second half was performed in ENVI software (I will note when the switch was made).
Speckle filtering
Speckle filtering reduce the salt and pepper noise on a raw radar image. I was provided an image by my professor for the following steps (Fig. 1).
I selected the Radar Speckle Suppression from the Utilities sub-tab from the Raster tab. I set the parameters in the Radar Speckle Suppression window to the following:
 |
| (Fig. 1) Original radar image provided for the lab. |
I selected the Radar Speckle Suppression from the Utilities sub-tab from the Raster tab. I set the parameters in the Radar Speckle Suppression window to the following:
- Coef. of Var. Multiplier = .5
- Output Options = Lee-Sigma
- Coef. of Variation = .275 (This value was calculated by selecting Calculate Coefficient of Variation in the Radar Suppresion dialog box and viewing the results in View Session Log found in the Session sub-tab of the File menu.
- Window Size = 3x3
- The remaining parameter were left as the defaults
I then selected ok to run the speckle suppression. After the first speckle suppression I ran another speckle suppression on the resulting image and then again on the second result. The parameters for each suppression was set to the following:
Speckle Suppression of 1st result
- Coef. of Var. Multiplier = 1.0
- Output Options = Lee-Sigma
- Coef. of Variation = .195
- Window Size = 5x5
- The remaining parameter were left as the defaults
Speckle Suppression of the 2nd result
- Coef. of Var. Multiplier = 2.0
- Output Options = Lee-Sigma
- Coef. of Variation = .103
- Window Size = 7x7
- The remaining parameter were left as the defaults
One way to evaluate the effectiveness of the speckle suppression is to analyze the histograms of the images. The histograms should become less jagged after each successful suppression pass (Fig. 2).
 |
| (Fig. 3) Display of the histograms as the become less jagged through speckle suppression. |
Edge enhancement
I performed edge enhancement on the original image and the result of the 3rd speckle suppression.
The edge enhancement is performed by selecting Non-directional Edge from the Spatial sub-tab of the Raster tab. The only parameter I set was the Output Option was set to Prewitt. The remaining perimeters were left alone.
Image enhancement
There are numerous image enhancement functions provided in Erdas Imagine. I will be utilizing the Wallis Adaptive Filter for this portion of the lab. I will be utilizing an image provided to me by my professor (Fig. 3).
There are numerous image enhancement functions provided in Erdas Imagine. I will be utilizing the Wallis Adaptive Filter for this portion of the lab. I will be utilizing an image provided to me by my professor (Fig. 3).
 |
| (Fig. 3) Original radar image I utilized to apply the Wallis Adaptive Filter. |
Opening the Radar Speckle Suppression as I did in previous steps I changed the Filter to Gamma-MAP. I then opened Adaptive Filter from the Spatial sub-tab from the Raster menu. Using the result from the Gamma-MAP suppression as the input file, I checked the Stretch to Unsigned 8 Bit box and confirmed the Window Size was set to 3 and the Multiplier was set to 3.0.
Sensor Merge
For this section of the lab I will be combing a radar image with a Landsat TM image of the same area (Fig. 4).
I used the Sensor Merge from the Utilities sub-menu located in the Raster tab. I loaded the original files into there respective input location. The parameters were set to the following:
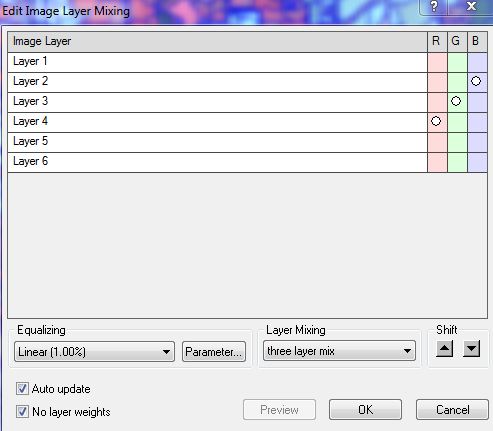
I then opened the images in the viewer utilizing Interactive Stretching from the Enhance menu. I compared 3 different stretch settings including Gaussian, Linear, and Square-root. The left Stretch field was set to 5 and the right was set to 95 for all methods.
Slant-to-Ground Range Transformation
I used the same image from the previous section of Death Valley. Slant-to-Ground Range transformation is required due to the side angle at which radar data is collected. The angle does not produce a true scale representation of the ground among other distortions. This step will correct the "ground range" of the image.
Selecting SIR-C from the Slant to Ground Range sub-menu from the Radar menu. After selecting the image and opening the file the Slant to Ground Range Parameter dialog box opens. I set the Output pixel size to 13.32, and the Resampling Method to Bilinear.
Results
Sensor Merge
For this section of the lab I will be combing a radar image with a Landsat TM image of the same area (Fig. 4).
 |
| (Fig. 4) Display of the two images to be merged together. Radar (Left) and TM image (Right). |
- Method was set to IHS
- Resampling Techniques was set to Nearest Neighbor
- IHS Substitution was set to Intensity
- R = 1, G = 2, B = 3
- Checked the box for Stretch to Unsigned 8 Bit
Apply Texture Analysis
An image from Erdas Imagine example data was utilized for this section of the lab (Fig. 5)
 |
| (Fig. 5) Erdas Imagine example data radar image utilized. |
I selected Texture Analysis feature from the Utilities sub-tab found under the Raster menu. In the dialog box I set the Operators to Skewness, the Window Size to 5.
Brightness Adjustment
I utilized the same image from Texture Analysis for this section of the lab. I selected Brightness Adjustment from the Utilities sub-menu which is located under the Raster menu. The Data Type was set to Float Single and the Output Options was set to Column.
Polarimetric SAR Processing and Analysis
The remaining sections of this lab were performed in ENVI 4.6.1.
In this section of the lab I will be working with radar imagery of a section of Death Valley. The imagery was collected by the SIR-C radar system. A great amount of preprocessing was applied to the imagery before I obtained the image from my professor.
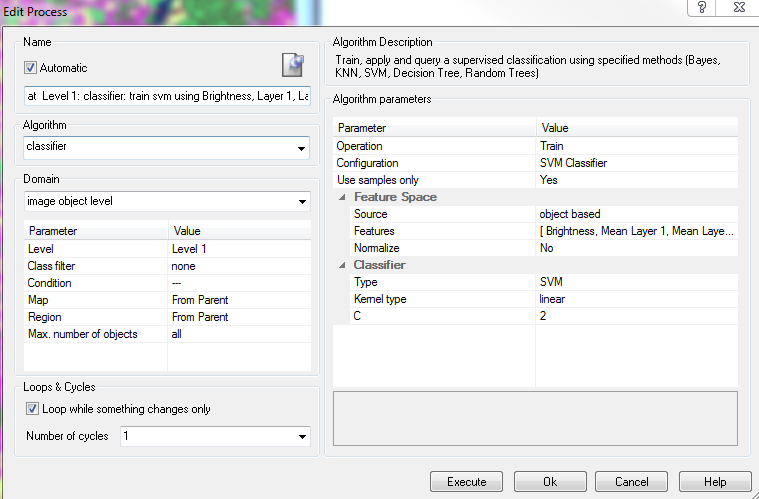
Synthesize Images
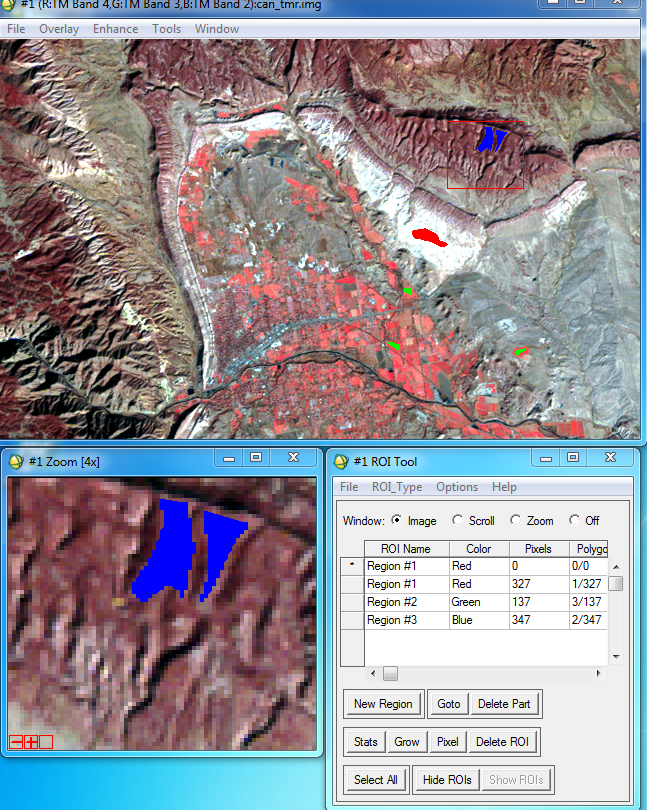
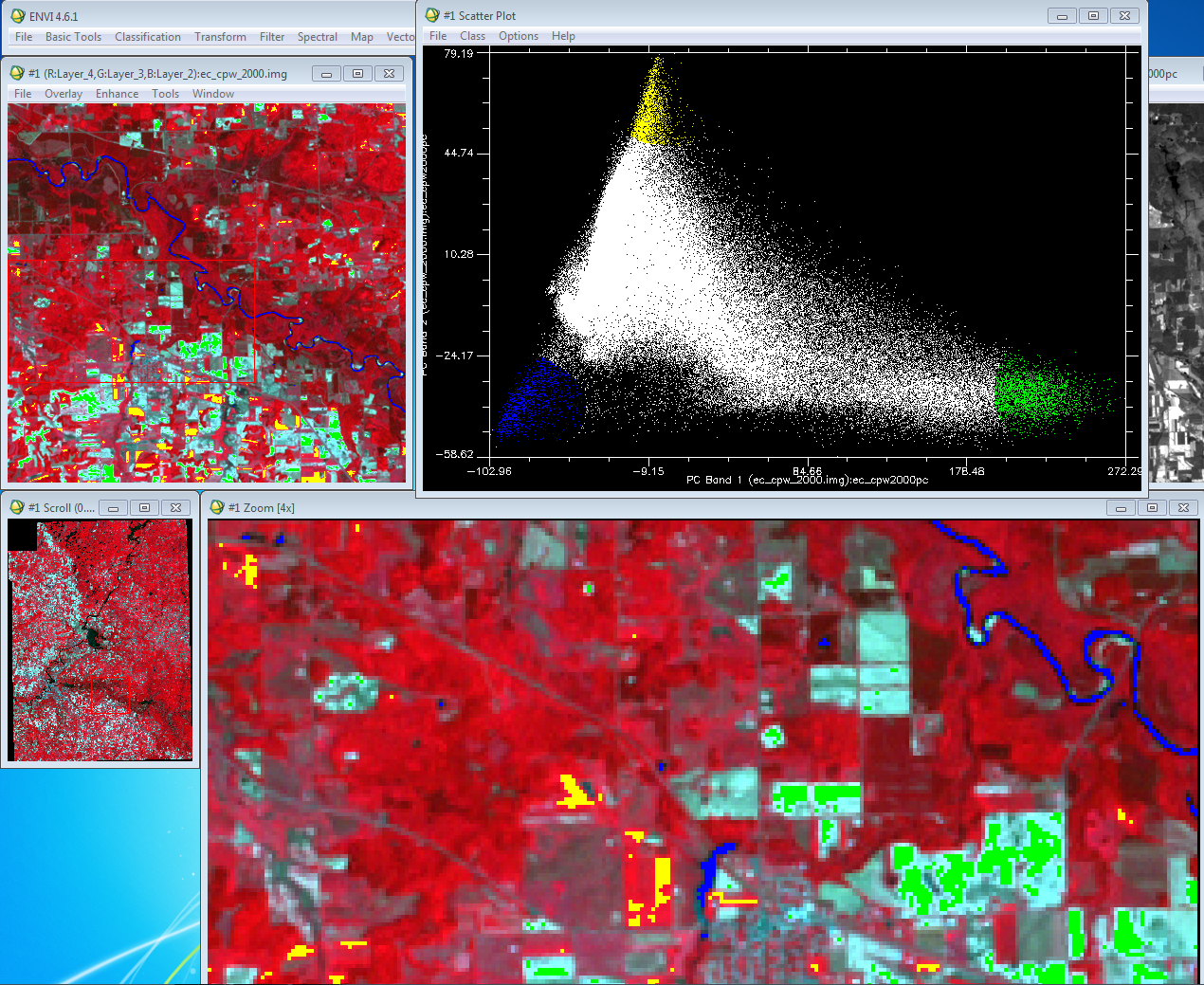
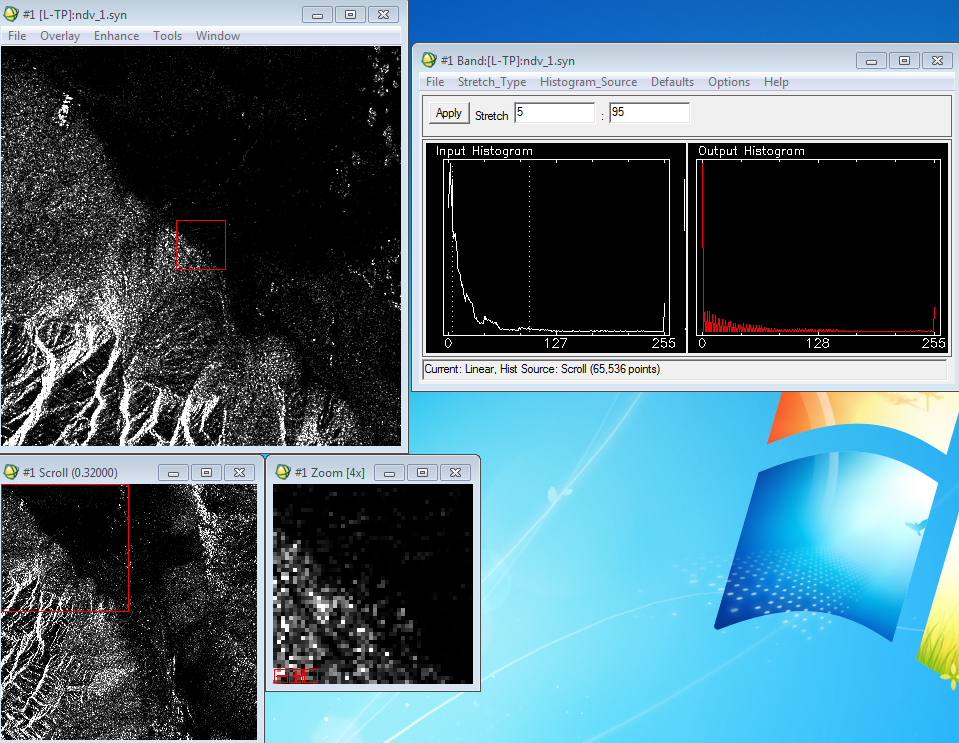
The SIR-C data I was provided was in a non-image/compressed format. To view the images I needed to mathematically synthesize the images from the compressed scattering matrix data. The first step is to select the file through the Synthesize SIR-C Data from the Polarimetric Tools sub-menu found under the main menu bar Radar menu. After opening the file the Synthesize Parameters dialog box opens (Fig. 6). Changing the Output Data Type to Byte I selected OK and the four polarization combinations were added to the Available Bands List. I then loaded one of the polarization images in to a new viewer (Fig. 7).
In this section of the lab I will be working with radar imagery of a section of Death Valley. The imagery was collected by the SIR-C radar system. A great amount of preprocessing was applied to the imagery before I obtained the image from my professor.
Synthesize Images
The SIR-C data I was provided was in a non-image/compressed format. To view the images I needed to mathematically synthesize the images from the compressed scattering matrix data. The first step is to select the file through the Synthesize SIR-C Data from the Polarimetric Tools sub-menu found under the main menu bar Radar menu. After opening the file the Synthesize Parameters dialog box opens (Fig. 6). Changing the Output Data Type to Byte I selected OK and the four polarization combinations were added to the Available Bands List. I then loaded one of the polarization images in to a new viewer (Fig. 7).
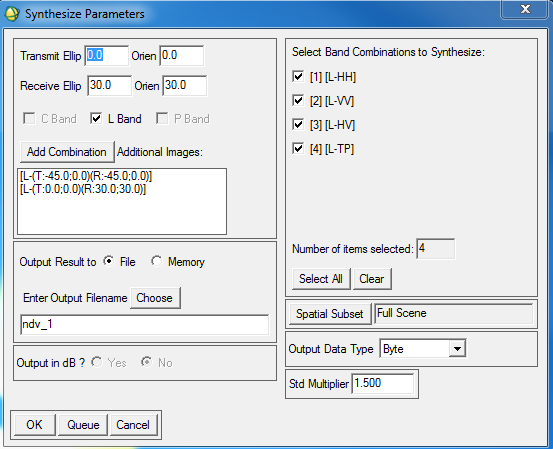 |
| (Fig. 6) Synthesize Parameters dialog box. |
 |
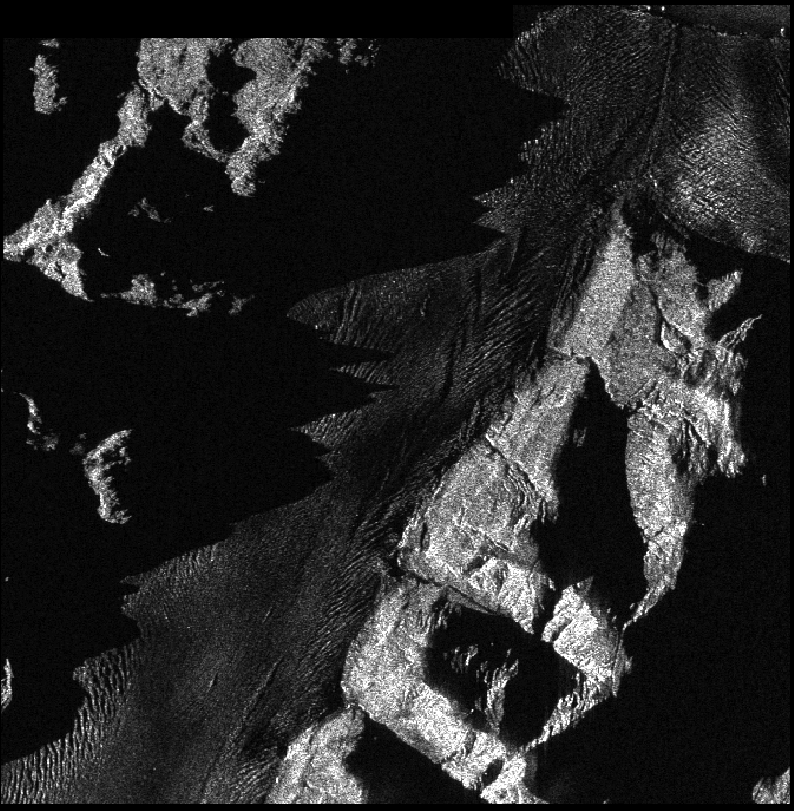
| (Fig. 7) Death Valley image after synthesizing the images. |
Slant-to-Ground Range Transformation
I used the same image from the previous section of Death Valley. Slant-to-Ground Range transformation is required due to the side angle at which radar data is collected. The angle does not produce a true scale representation of the ground among other distortions. This step will correct the "ground range" of the image.
Selecting SIR-C from the Slant to Ground Range sub-menu from the Radar menu. After selecting the image and opening the file the Slant to Ground Range Parameter dialog box opens. I set the Output pixel size to 13.32, and the Resampling Method to Bilinear.
Results
 |
| (Fig. 8) Display of the speckle filter results. The original image (top left), 1st suppression (top right), 2nd suppression (bottom left), and 3rd suppression (bottom right). |
 |
| (Fig. 9) Results from Edge Enhancement |
 |
| (Fig. 10) Results for the Wallis_Filter (right) and original image (left). |
 |
| (Fig.11) Merge results |
 |
| (Fig. 12) Texture analysis results. |
 |
| (Fig. 13) Brightness Enhancement results |
 |
| (Fig. 14) Guassian Stretch result. |
 |
| (Fig. 15) Interactive Stretch result. |
 |
| (Fig. 16) Linear Stretch Result |
 |
| (Fig. 17) Square Root Stretch result |
 |
| (Fig. 18) Slant Range result. |